
Лекция 5 – Конфирматорный факторный анализ
22 сентября 2021 г.
Латентные переменные
Наблюдаемые vs Латентные переменные
Резонно ли допущение о том, что конструкт измерен безошибочно?
Зависит от полноты имеющейся информации об изучаемом конструкте.
В каждом отдельном случае зависит от надежности и валидности измерительных инструментов.
* Рост
* Пол
* Возраст
* Образование
* Социально-экономический статус
* Доверие парламенту
* Субъективное благополучие
* Потребительская привлекательность продуктаДаже в случае переменной «рост» лучше применять многоиндикаторное измерение конструкта (например, утром, днем и вечером).
Латентная переменная - это
- Явление, которое нельзя наблюдать непосредственно.
- Ожидаемое значение наблюдаемой переменной (очищенное от ошибки, «истинное значение» либо latent response model).
- Вообще любая переменная, для которой нет значений в данных (Боллен).
- Все, что есть общего у индикаторов (аксиома локальной независимости).
Типы латентных переменных
- Априорные и апостериорные (есть ли в существующей теории)
- Рефлективные - где индикаторы являются следствиями лат.переменных vs. формативные, где индикаторы - причины
- Интервальные или категориальные (факторы vs. кластеры)
- Идентифицированные и неидентифицированные (есть ли шанс их измерить).
Измерение латентных переменных
Виды моделей с латентными переменными
- Линейные регрессии (остаток)
- Мультиномиальные регрессии (преобразованная зависимая переменная)
- Факторный анализ (факторы)
- Модели латентного роста (кривая роста)
- Анализ латентных классов (классы/кластеры)
- Item Response Theory - современная теория тестов (ability, «способность»)
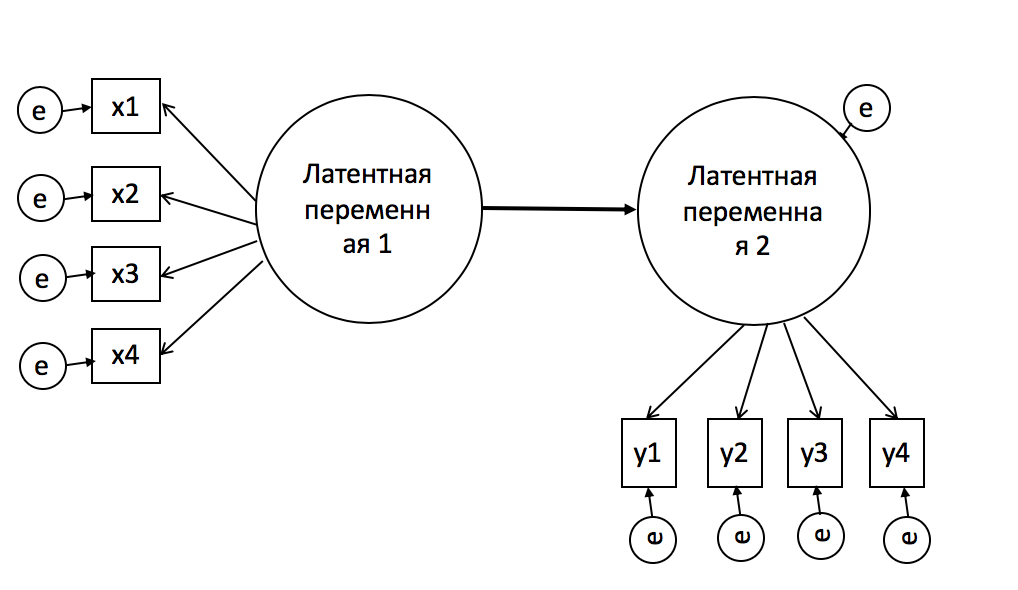
- Структурные модели с латентными переменными
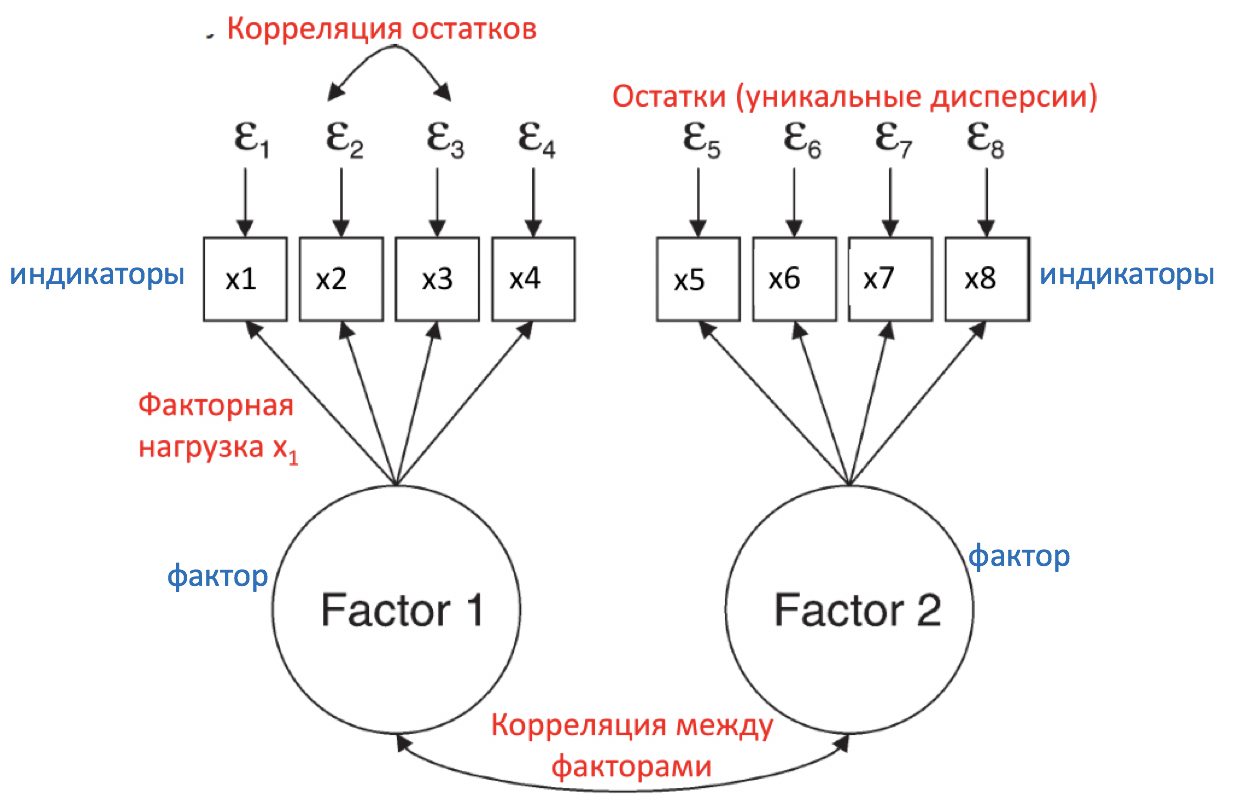
Модель общего фактора Терстоуна
Цель факторного анализа – найти параметры латентной(ых) переменной(ых), которые объясняют всю* корреляцию/ковариацию между всеми переменными-индикаторами через расщепление дисперсии индикаторов на общую и уникальную.*
Терстоун
Каждый индикатор является линейной функцией одного или более факторов и уникальных дисперсий индикаторов.
То же, в виде факторного анализа .
Анализ (метод) главных компонент не является факторным анализом
потому что
- не расщепляет дисперсию наблюдаемых переменных на общую (фактор) и уникальную (остатки);
- ошибка измерения/модели не берется в расчет;
- ищет такие веса собственных значений (компоненты weigenvalues), при учете которых дисперсии индикаторов максимально объясняются; в факторном анализе целью является объяснение ковариаций;
АГК предназначен для сокращения размерности данных.
Типичный пример: сжатие изображений. Чтобы сохранить максимум информации об изображении, но существенно сократить информацию о каждом пикселе.
- Может работать с небольшими выборками.
- Не требует теории о латентной переменной,
Не подходит для индикаторов, которые слабо друг с другом связаны.Плохо подходит для случаев, когда планируется дальнейшее проведение КФА.
КФА
Модели конфирматорного и разведывательного ФА
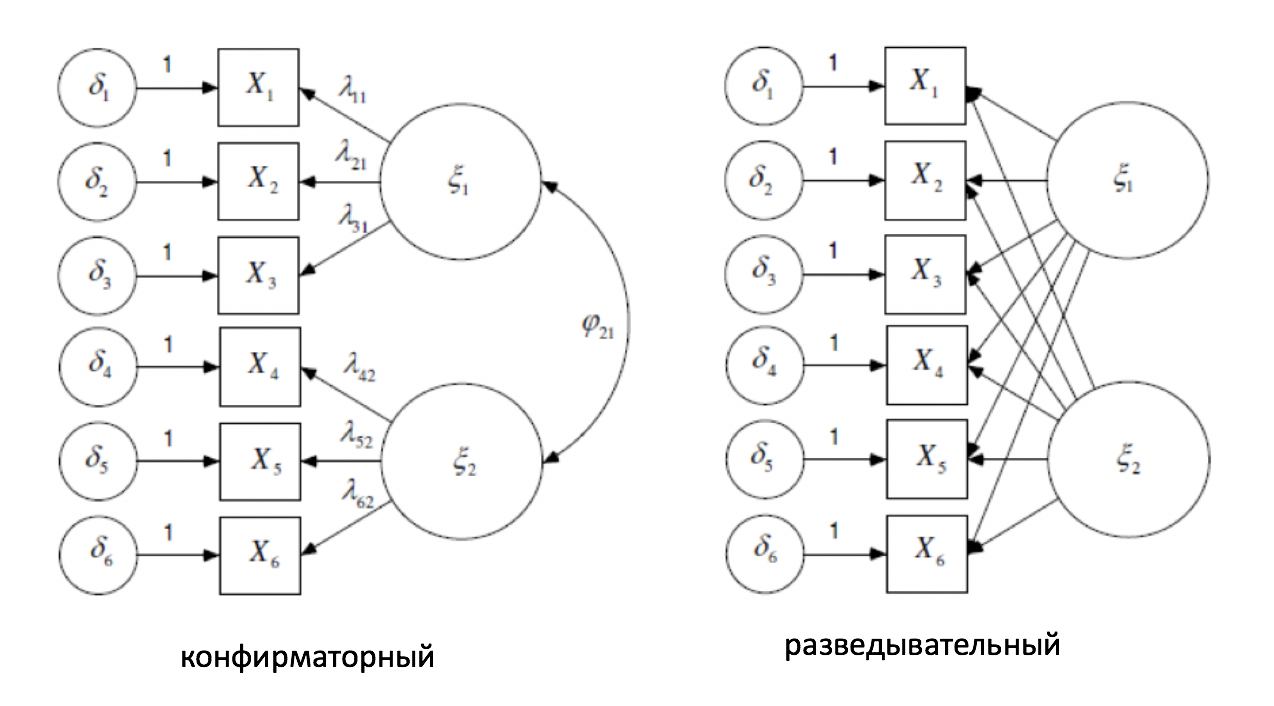
В отличие от разведывательного, конфирматорный ФА:
- Следует правилу экономности, используя меньшее количество параметров;
- Пересекающиеся нагрузки (cross-loadings) исходно зафиксированы равными нулю (но можно и отменить эту фиксацию);
- Вращение не требуется, т.к. более простая структура достигается за счет фиксации параметров;
- Позволяет включать корреляции между остатками индикаторов;
- Позволяет проверять различные гипотезы через сравнение моделей.
Различия факторных анализов
| Разведывательный | Подтверждающий/Конфирматорный |
|---|---|
| (Exploratory FA – EFA) | (Confirmatory – CFA) |
| Нет предварительной теории. | Теория существует. |
| Отталкиваемся от того, что подсказывают данные. | Исходим из теории и подхода проверяющего гипотезы. |
| Цель – описание данных. | Цель – проверка гипотез о генсовокпуности. |
| Количество факторов неизвестно. | Количество факторов известно априори. |
| Используется на ранних стадиях разработки измерительных шкал. | На поздних стадиях, когда набор индикаторов и их принадлежность к различным факторам уже известна. |
| Нагрузки всех индикаторов на все факторы устанавливаются свободно (сложности интерпретации) | Нагрузки некоторых индикаторов на соответствующие факторы, остальные нагрузки фиксируются равными нулю |
Допущение о локальной независимости
Вся общая ковариация, которая есть у индикаторов одного фактора – является проявлением влияния этого фактора.
Локальная независимость - нескоррелированность индикаторов после “вычитания” из них фактора.
Однако у групп индикаторов могут быть и другие источники ковариации, такие как:
- Метод опроса;
- Формат вопроса;
- Формулировка вопроса;
- Источник данных;
- Последовательность вопросов;
- Содержание (указывает на дополнительный фактор).
Уникальные дисперсии индикаторов могут быть скоррелированы только в КФА
Уравнения и идентификация КФА
Основные уравнения КФА
Дисперсия индикатора = факторная нагрузка в квадрате X на дисперсию фактора + остаток. \[ Var(y_1) = F.loading_{y_1}*F.loading_{y_1} * Var_{F_1} + Residual_{y_1} \]
Ковариация между двумя индикаторами одного фактора = произведение нагрузок этих индикаторов и дисперсии этого фактора. \[ Covar_{y_1, y_2} = F.loading_{y_1}*F.loading_{y_2}*Var_{F}\] Ковариация между двумя индикаторами одного фактора, между остатками которых разрешена ковариация = произведение нагрузок этих индикаторов, дисперсии фактора плюс ковариация остатков. \[ Covar_{y1,y2} = F.loading_{y_1}*F.loading_{y_2}*Var_{F}+Covar_{Residuals(y_1,y_2)} \]
Ковариация между двумя индикаторами разных факторов = произведение нагрузок этих индикаторов и ковариации между факторами \[ Covar_{y1(F1),y3(F2)} = F1.loading_{y1} * F2.loading_{y3} * Covar_{F1,F2} \]
Пример вычисления
ess7 <- haven::read_sav("data/ESS7e02_1.sav")
Austria <- ess7[ess7$cntry == "AT",]
library(lavaan)
cfa1 <- cfa( 'F1 =~ ipadvnt + impfun + impdiff + ipgdtim;
F2 =~ ipcrtiv+ impfree;
impfun ~~ ipgdtim;
', data=Austria)
semPlot::semPaths(cfa1, whatLabels="est", style="lisrel", layout="tree2", rotation=2, sizeMan=10, nCharNodes=0, edge.label.cex=1.1)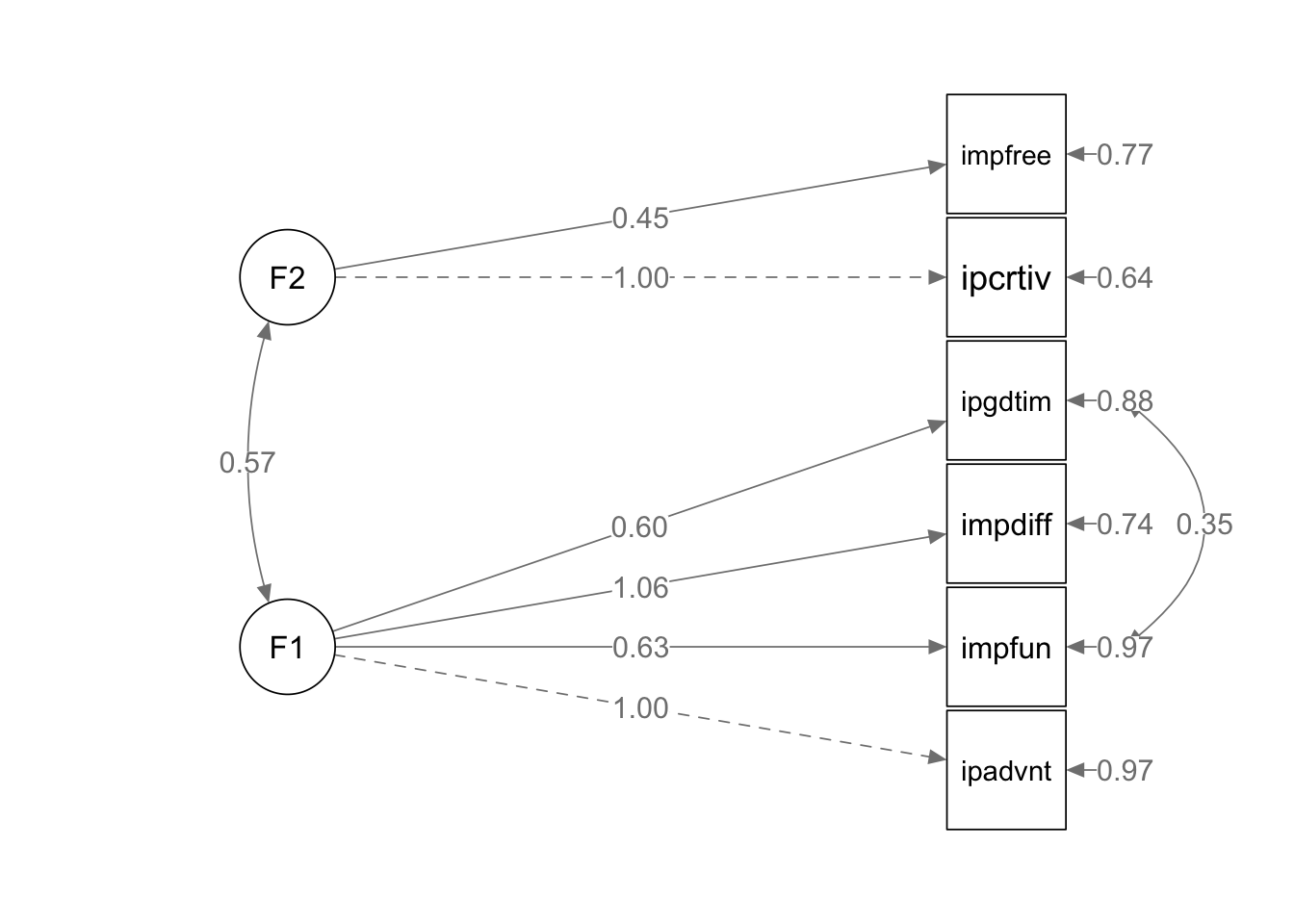
lavInspect(cfa1, "cov.ov") # предсказанная моделью матрица дисперсий-ковариаций## ipdvnt impfun impdff ipgdtm ipcrtv impfre
## ipadvnt 1.867
## impfun 0.568 1.333
## impdiff 0.947 0.601 1.743
## ipgdtim 0.536 0.687 0.567 1.201
## ipcrtiv 0.569 0.361 0.602 0.341 1.480
## impfree 0.257 0.163 0.272 0.154 0.379 0.938Идентификация структурных моделей
\(df≥0\): количество степеней свободы должно быть равно или больше нуля;
\(df = N_{obs} – N_{par}\): кол-во степеней свободы – это разница между количеством уникальных элементов матрицы дисперсии-ковариации наблюдаемых переменных и количеством параметров в модели;
\(N_{obs} = (N_{vars}(N_{vars} + 1))/2\): количество уникальных элементов матрицы дисперсии-ковариации;
\[Npar_{FA} = (N_{fact} * (N_{fact}+1))/2 + N_{vars}*N_{fact} + N_{vars} – N_{fact}\]
Количество параметров в факторном анализе включает:
- дисперсии и ковариации факторов Nfact*(Nfact+1))/2,
- остатки наблюдаемых переменных Nvars,
- факторные нагрузки Nvars * Nfact,
- исключает зафиксированные параметры Nfact (фиксируется либо дисперсия фактора = 1, либо одна из нагрузок в каждом факторе = 1).
Идентификация: простые правила
В КФА:
- Df≥0
- Каждой латентной переменной (включая остатки) должная быть приписана метрика: Дисперсии факторов или одна нагрузка на каждый из факторов должны быть зафиксированы (обычно равными 1)
- В случае однофакторной модели – не менее 3-х индикаторов.
- 3 индикатора на фактор рекомендованы и для других КФА.
В путевом анализе/структурной части:
- все путевые модели, не включающие циклов идентифицированы.
Как выбирать метрику для латентной переменной (фактора)?
Нужно взять индикатор, обладающий известными характеристиками, наиболее надежный и валидный, т.е. именно он будет задавать «единицу измерения» латентной переменной (фактора)
1
2
3
Не идентифицированная - 1
-1 степень свободы
Не идентифицированная - 2
-1 степень свободы
Проверка гипотез в КФА
Фиксирование параметров
- назначение априорного значения (обычно 1 или 0) одному из искомых параметров.
По сути зафиксированный параметр не является параметром (т.е. искомым), поскольку его значение определено априорно.
Используется
- для сокращения количества параметров в модели с целью идентифицировать модель;
- для проверки гипотез о равенстве 0 (или любому другому значению).
Ограничение параметров
- ограчение диапазона возможных значений параметра через математическое выражение и отношения с другими параметрами.
Например, можно ограничить два параметра выражением равенства, т.е. назначить их равными друг другу.
Фиксирование и ограничение параметров для проверки гипотез
Сравнение вложенных моделей с зафиксированными/ограниченными vs. свободными параметрами.
Например:
- Нагрузки всех индикаторов равны;
- Нагрузки некоторых индикаторов равны нулю;
- Нагрузки индикаторов равны в различных выборках;
- Двухфакторная модель лучше трехфакторной;
- Проверка допущения о нескоррелированности остатков.
Являются вложенными
две модели, одна из которых может быть получена посредством фиксации или ограничения параметров другой.
В КФА:
- Одно- и двухфакторная модель при условии неизменности остальных параметров (аналогично фиксированию корреляции между факторами 1)
- Модель с фактором второго порядка и обычный КФА с факторами, корреляции между которыми не зафиксированы равными нулю.
- Тест разницы хи-квадратов применим только для вложенных моделей.
Не являются вложенными
- Модели, в которых одновременно исключаются и включаются различные параметры.
- Модели, в которых различаются наборы наблюдаемых переменных
- Для таких моделей НЕ СУЩЕСТВУЕТ статистически обоснованных критериев сравнения. Процесс модификации модели в этом случае обрывается и запускается новый цикл поиска модели.
Примеры
Полная
Вложенная
Оценка согласия модели
Предсказанная и наблюдаемая матрица дисперсий-ковариаций
# Наблюдаемая матрица дисперсий-ковариаций
observed.var.cov <- cov(Austria[,c("ipadvnt", "impfun", "impdiff", "ipgdtim", "ipcrtiv", "impfree")], use="complete.obs")
round(observed.var.cov,2)## ipadvnt impfun impdiff ipgdtim ipcrtiv impfree
## ipadvnt 1.87 0.63 0.96 0.52 0.50 0.18
## impfun 0.63 1.33 0.56 0.69 0.32 0.21
## impdiff 0.96 0.56 1.74 0.53 0.65 0.25
## ipgdtim 0.52 0.69 0.53 1.20 0.40 0.33
## ipcrtiv 0.50 0.32 0.65 0.40 1.48 0.38
## impfree 0.18 0.21 0.25 0.33 0.38 0.94# Предсказанная моделью
implied.var.cov <- lavInspect(cfa1, "cov.ov")
implied.var.cov## ipdvnt impfun impdff ipgdtm ipcrtv impfre
## ipadvnt 1.867
## impfun 0.568 1.333
## impdiff 0.947 0.601 1.743
## ipgdtim 0.536 0.687 0.567 1.201
## ipcrtiv 0.569 0.361 0.602 0.341 1.480
## impfree 0.257 0.163 0.272 0.154 0.379 0.938# Разница между предсказанной и наблюдаемой матрицами дисперсий-ковариаций (матрица остатков)
implied.var.cov - observed.var.cov## ipdvnt impfun impdff ipgdtm ipcrtv impfre
## ipadvnt -0.001
## impfun -0.067 -0.001
## impdiff -0.017 0.037 -0.001
## ipgdtim 0.012 0.000 0.036 -0.001
## ipcrtiv 0.065 0.045 -0.044 -0.055 -0.001
## impfree 0.072 -0.045 0.023 -0.175 0.000 -0.001GFI
Goodness of Fit index
Рекомендованные значения: >0.90
Индекс абсолютного согласия – доля ковариаций, объясненных моделью (сравнивает модель с параметрами и «нулевую» модель без параметров совсем),
\[GFI = 1 – \frac{сумма~квадратов ~остатков}{сумма ~квадратов ~наблюдаемой ~матрицы ~дисперсии/ковариации}\]
- Зависит от размера выборки (положительно связан)
SRMR
Standardized Root Mean Square Residual
Рекомендованные значения: <0.08
- Усредненный остаток (сравниваются предсказанная моделью матрица корреляций и реальная)
- Некоторые остатки могут быть высокими, и это не будет отражено в SRMR, поэтому лучше рассматривать матрицы остатков самостоятельно
residuals(path1, type="standardized")`Два разных хи квадрата
Хи-квадрат тестируемой модели [Chi-Square Test of Model Fit /Minimum Function Test Statistic] - сравнивает предсказанную нашей моделью матрицу ковариаций и эмпирическую матрицу ковариаций.
\[\chi^2 = F_{ML}*(N-1)~ при~ df_M\] где \(F_{ML}\) - значение функции правдоподобия, \(N\) – размер выборки.
Хи-квадрат модели независимости [Baseline Model/Independence model] - сравнивает матрицу, предсказанную моделью независимости и эмпирическую матрицу ковариаций.
CFI
Comparative Fit index
Рекомендованные значения: >0.90 или >0.95
Сравнительный индекс, сравнивает согласие тестируемой модели и «базовой» модели независимости с эмпирической матрицей дисперсии-ковариации.
- Базовая модель маловероятна, поэтому значения обычно очень высоки.
\[ CFI = 1- \frac{\chi^2_{model}-df_{model}}{\chi^2_{independence}-df_{independence}}\]
TLI
Tucker-Lewis Index
Рекомендованные значения: >0,90 или >0,95.
По смыслу похожа на CFI.
Иногда превосходит 1.
\[ TLI = \frac{\frac{\chi^2_{independence}}{df_{independence}} - \frac{\chi^2_{model}}{df_{model}}}{ \chi^2_{independence}/df_{independence}-1 }\]
RMSEA
Root Mean Squared Error of Approximation
Рекомендованные значения: <0.08
PCLOSE – вероятность близости RMSEA к 0,05
Чем выше значения RMSEA, тем НИЖЕ согласие модели.
Наказывает за большее количество параметров.
\[ RMSEA = \sqrt\frac{\chi^2_{model} - df_{model}}{df_{model}*(N-1)} \] Лучше других работает на больших выборках.
Следует уделять внимание доверительному интервалу RMSEA
Демонстрируйте все показатели согласия
так как все они имеют свои недостатки и в одиночестве могут ввести вас и читателя в заблуждение относительно модели.
Обычные (стандатизованные) остатки – также важный критерий согласия модели, указывающий на локальные источники ошибки.
Информационные критерии для сравнения невложенных моделей
хи-квадрат модели с поправкой на сложность модели, размер выборки и количество переменных
❗️ По-разному вычисляются в разных программах. Годятся только для сравнения моделей, вычисленных одной программой. Не несут содержательного смысла сами по себе.
Akaike Information Criterion - AIC \[ AIC = χ^2 - 2*df \]
Bayesian Information Criterion - BIC \[ BIC = χ^2+\log(N_{samp})*(N_{vars}(N_{vars} + 1)/2 – df) \]
The Sample-Size Adjusted BIC \[ SABIC = χ^2 +[(N_{samp} + 2)/24]*[N_{par}*(N_{par} + 1)/2 - df] \]
Expected Cross-Validation Index \[ ECVI = \frac{χ^2}{N-1} + \frac{2*N_{par}}{N-1} \]
\(df\) -количество степеней свободы
\(N_{vars}\) – количество переменных в модели
\(N_{par}\) – количество свободных параметров в модели
\(N_{samp}\) – размер выборки
Чем меньше, тем лучше.
Все статистики согласия обладают следующими ограничениями
- Оценивают согласие всей модели, но не отдельных ее параметров, объединяя «хорошие» результаты и «плохие»
- Нет единственного критерия согласия модели, всегда нужно смотреть на несколько критериев
- Критерии согласия не указывают на источники низкого (или высокого) качества
- Критерии согласия не говорят о предсказательной силе модели для индивидуальных данных (как это делает R2)
- Высокие показатели согласия модели не являются гарантией теоретической осмысленности модели
Применение КФА
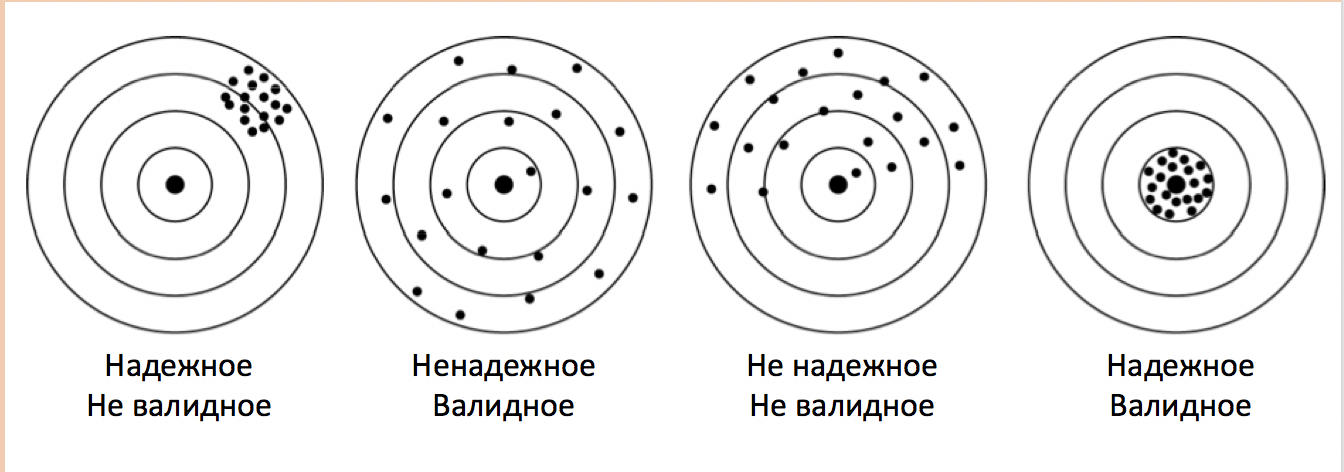
Надежность измерения – насколько точно измерение
Степень, в которой значения переменной свободны от случайно ошибки измерения.
- Согласованность (Альфа Кронбаха) – общая скоррелированность между наблюдаемыми переменными
- Устойчивость (тест-ретест)
- Надежность параллельных форм (различными индикаторами) – сравнение средних/в SEM - латентных средних
- DIF - differential item functioning (различное функционирование индикаторов на разных выборках) – специальное применение многогруппового КФА в проверках на инвариантность измерения.
- и другие.
Большее количество индикаторов на один концепт помогают повысить надежность измерения. Большее разнообразие индикаторов повышает валидность, так как они охватывают различные аспекты изучаемого явления и единственное, что у них остается общего – это дисперсия самого концепта.
Омега МакДональда: показатель надежности измерения латентной переменной (аналог альфы Кронбаха для КФА)
Более высокие значения соответствуют большей консистентности (однородности) индикаторов. Применим только для ФА с индикаторами на одной шкале.
\[ \omega = \frac{(Сумма~нагрузок)^2}{((Сумма~нагрузок)^2+сумма~остатков (+корр. остатков)}\]
Валидность измерения – измеряет ли инструмент то, что он должен измерять.
- Конструктная (измеряет ли то, что должен измерять) – самая важная!
- Содержательная (индикаторы покрывают все стороны измеряемого конструкта)
- Конвергентная (другой инструмент, измеряющий тот же конструкт, дает такие же результаты), Дивергентная (не коррелирует с конструктом, с которым теоретически не связана)
- Дискриминантная (отличается от близких/схожих конструктов)
- Критериальная (измерения схожих конструктов связаны с результатами измерения данного)
- Предсказательная (предсказывает теоретически возможные исходы)
DIF – differential item functioning
- Ситуация, в которой одни и те же индикаторы по-разному работают на разных выборках.
- Например, студенты мужского пола обычно лучше справляются с заданиями, в контексте которых есть спорт или техника.
Факторы второго порядка
higher-order factor models
Факторы второго порядка объясняют ковариации между фаткорами первого порядка.
Все правила построения КФА распространяются и на факторы второго порядка.
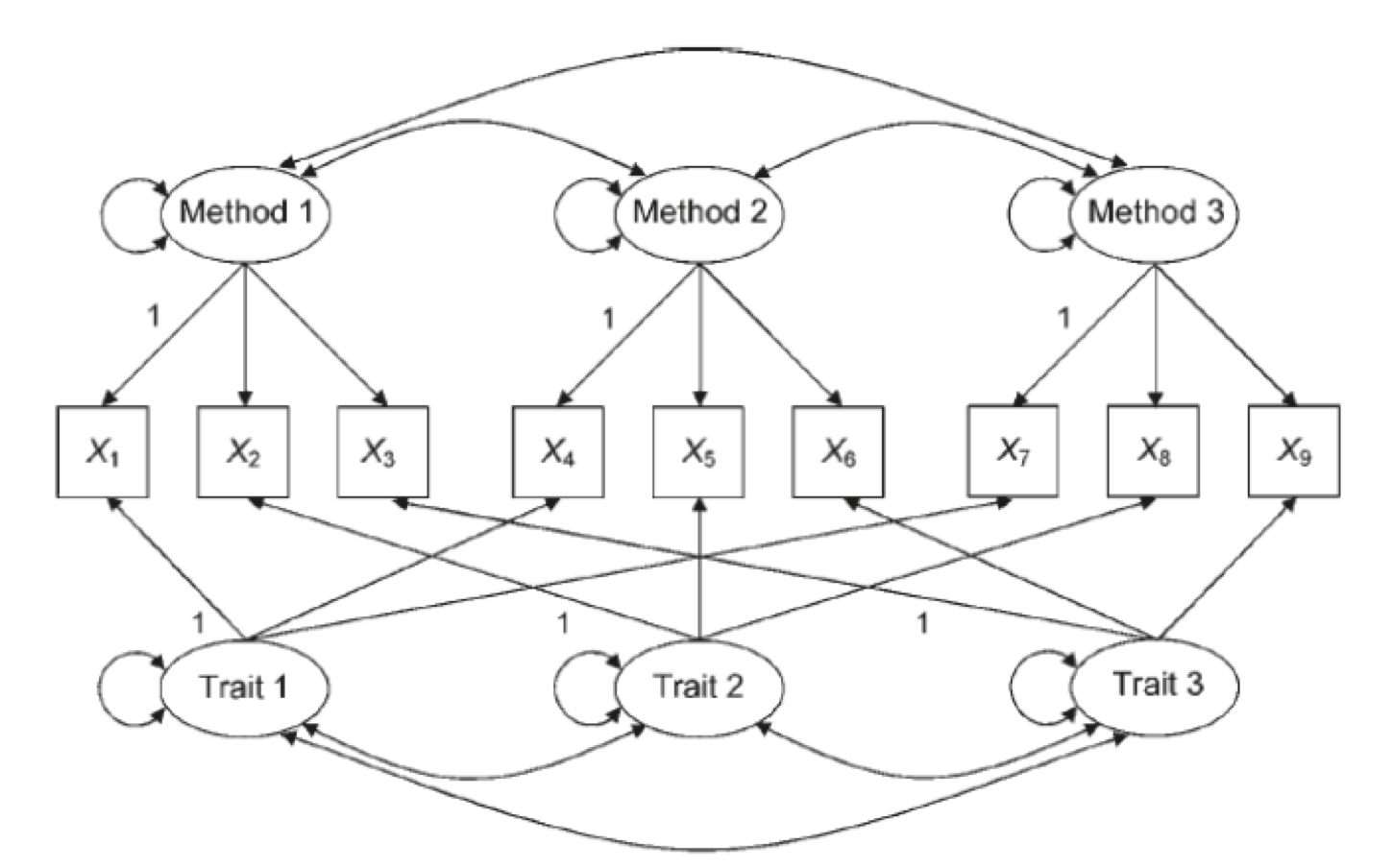
Структурные модели второго порядка
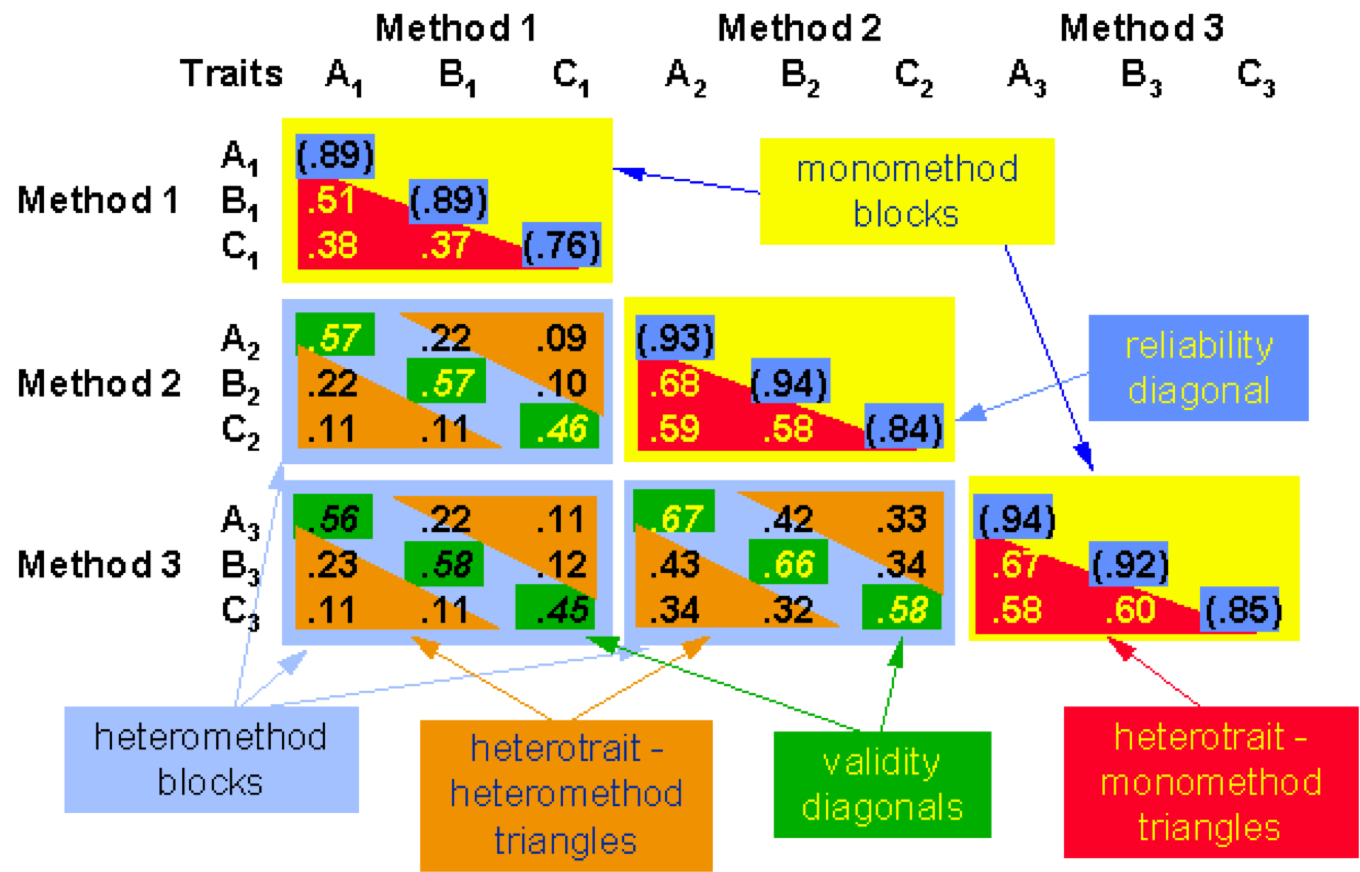
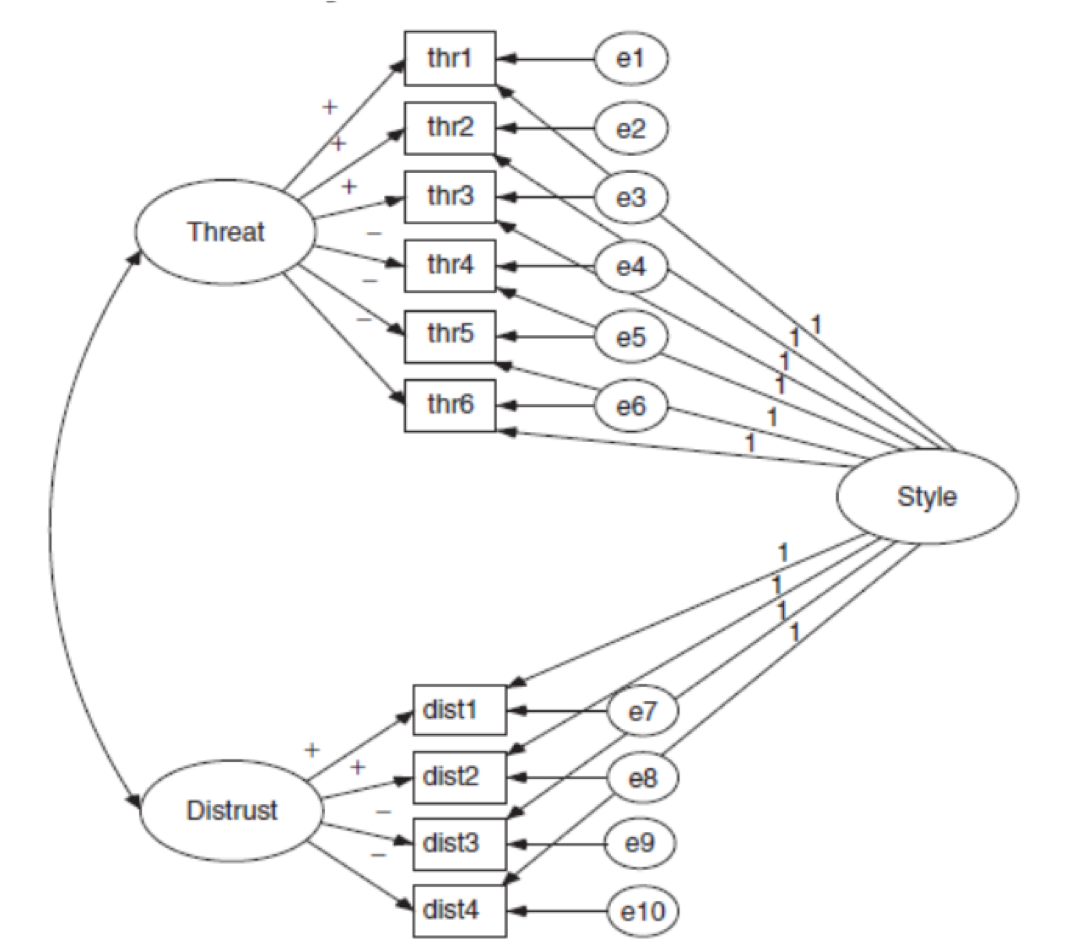
MTMM - Multitrait-multimethod models (MTMM)
- Модель множественных латентных переменных при множестве методов
- Позволяет оценить конвергентную и дискриминантную валидность измерения латентных переменных
MIMIC - multiple indicators multiple causes
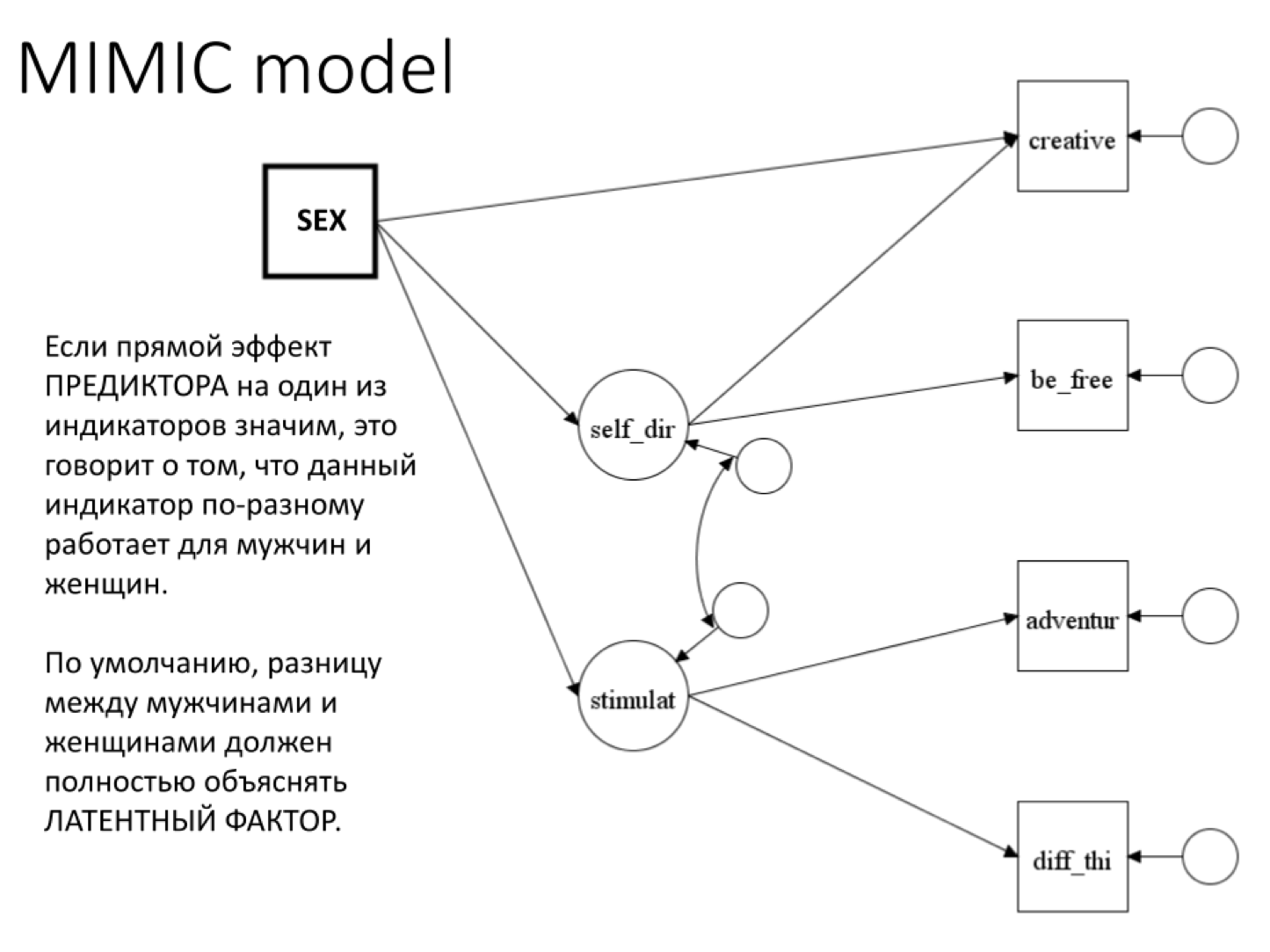
Модели с методическим фактором
Формативная модель измерения
Примеры:
- Социально-экономический статус;
- Экономические показатели;
- Медицинские;
Часто ошибочно используются и в социологии!
Проблемы формативной модели
Удаление одного из индикаторов изменяет содержание индекса, т.к. они независимы.
Нет ошибки измерения.
Модель не идентифицирована в терминах структурных уравнений.
Оправдана только тогда, когда есть полная уверенность в том, что индикаторы являются
причинойлатентной переменной.
